
































 ogłaszają strategiczną współpracę, aby przyspieszyć rozwój centrów danych AI")














 Nowoczesne sterowniki PLC potrafią przeprowadzić znaną i cenioną w teorii sterowania analizę częstotliwościową pętli regulacji. Opisana w artykule funkcja analizy Bodego poprawiła jakość sterowania gazowym silnikiem turbinowym, pomagając klientowi uzyskać wymagane certyfikaty.
Nowoczesne sterowniki PLC potrafią przeprowadzić znaną i cenioną w teorii sterowania analizę częstotliwościową pętli regulacji. Opisana w artykule funkcja analizy Bodego poprawiła jakość sterowania gazowym silnikiem turbinowym, pomagając klientowi uzyskać wymagane certyfikaty.
Analiza zależności amplitudy i fazy w danej pętli regulacji od częstotliwości sygnału to popularna metoda wykorzystywana w syntezie układów sterowania. Dedykowane urządzenia do takich analiz były skomplikowane i drogie, dlatego nie znalazły zastosowania w przemyśle, a same charakterystyki Bodego pozostawały narzędziem zarezerwowanym dla komputerów i zaawansowanych środowisk symulacyjnych. Nowoczesne sterowniki PLC potrafią przeprowadzać analizę częstotliwościową pętli szybko i bez nadmiernych trudności.
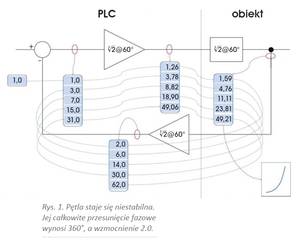
Chociaż może się to wydawać trywialne, aby zapewnić stabilność układu regulacji, jego sprzężenie zwrotne musi pozostać ujemne. Jeśli dla jakiejś częstotliwości, całkowite przesunięcie fazowe pętli wynosi 360°, negatywne sprzężenie staje się dodatnie, a cała pętla niestabilna. Ponieważ odejmowanie sygnału błędu od sygnału zadanego wprowadza przesunięcie o 180°, pozostałe elementy pętli muszą wprowadzać przesunięcie mniejsze niż 180°.
Rysunek 1 pokazuje sytuację, w której pętla staje się niestabilna, ponieważ jej całkowite przesunięcie fazowe wynosi 360°, a wzmocnienie 2,0.
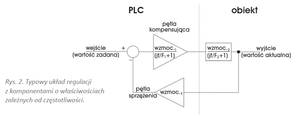
W przeciwieństwie do uproszczonej sytuacji z rysunku 1, wzmocnienie i faza każdego z elementów pętli może być zmienna i zależeć od częstotliwości i punktu pracy.
Na rysunku 2 przedstawiono typowy układ regulacji z komponentami o właściwościach zależnych od częstotliwości.
 Byłoby idealnie, gdyby nasz obiekt sterowania miał nieograniczone pasmo przenoszenia (innymi słowy nie wykazywałby, zmiennych właściwości w żądanym zakresie częstotliwości). Niestety tak jest bardzo rzadko. Przy niektórych częstotliwościach obiekt może zachowywać się dziwnie, zwykle takich częstotliwości jest wiele. Na potrzeby tego przykładu obiekt zostanie zamodelowany za pomocą stałego wzmocnienia 1,0, a jego pasmo będzie ograniczone filtrem dolnoprzepustowym o częstotliwości 10 Hz.
Byłoby idealnie, gdyby nasz obiekt sterowania miał nieograniczone pasmo przenoszenia (innymi słowy nie wykazywałby, zmiennych właściwości w żądanym zakresie częstotliwości). Niestety tak jest bardzo rzadko. Przy niektórych częstotliwościach obiekt może zachowywać się dziwnie, zwykle takich częstotliwości jest wiele. Na potrzeby tego przykładu obiekt zostanie zamodelowany za pomocą stałego wzmocnienia 1,0, a jego pasmo będzie ograniczone filtrem dolnoprzepustowym o częstotliwości 10 Hz.
Taki jednoelementowy dolnoprzepustowy filtr nie przesuwa fazy poniżej swojej częstotliwości granicznej. Dla częstotliwości granicznej przesunięcie wynosi 45°, a powyżej niej 90°. Podobnie ze wzmocnieniem: poniżej częstotliwości granicznej wynosi 1,0, a dla częstotliwości granicznej 1,0/?2. Dla dużych częstotliwości wzmocnienie opisane jest zależnością 1,0/częstotliwość.
 Jeśli obiekt ma dwa (lub więcej) filtrów dolnoprzepustowych, a każdy z nich może wprowadzić przesunięcie o 90°, to oba razem wprowadzają przesunięcie 180° i pętla regulacji staje się niestabilna. Typową metodą przeciwdziałania takiej sytuacji jest wprowadzenie ?dominującego bieguna? do pętli regulacji. Dominujący biegun to jednoelementowy filtr dolnoprzepustowy o częstotliwości niższej niż najniższa częstotliwość graniczna naturalnych filtrów obecnych w układzie, na które nie mamy zwykle wpływu.
Jeśli obiekt ma dwa (lub więcej) filtrów dolnoprzepustowych, a każdy z nich może wprowadzić przesunięcie o 90°, to oba razem wprowadzają przesunięcie 180° i pętla regulacji staje się niestabilna. Typową metodą przeciwdziałania takiej sytuacji jest wprowadzenie ?dominującego bieguna? do pętli regulacji. Dominujący biegun to jednoelementowy filtr dolnoprzepustowy o częstotliwości niższej niż najniższa częstotliwość graniczna naturalnych filtrów obecnych w układzie, na które nie mamy zwykle wpływu.
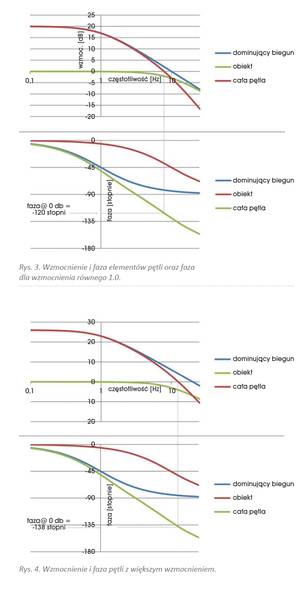
Na potrzeby tego przykładu w naszym układzie umieścimy dominujący biegun o częstotliwości 1 Hz i wzmocnieniu 10. Na rysunku 3. przedstawiono wpływ dominującego bieguna na wzmocnienie i fazę całego układu ? wzmocnienie całkowite spada poniżej 1,0 (0,0 dB), zanim przesunięcie fazy osiągnie wartość 180°.
Rysunek 3 pokazuje wzmocnienie i fazę elementów pętli oraz fazę dla wzmocnienia równego 1,0.
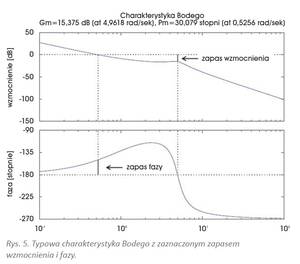
W ogólnym przypadku im większe jest wzmocnienie elementu kompensującego, tym lepsze nadążanie układu za zmianami wartości zadanej. Wszystko ma jednak swoją cenę. Jeśli zmienimy wzmocnienie dominującego bieguna z 10 na 20 (co pokazano na rysunku 4), przesunięcie fazowe pętli zmieni się ze 127° na 137°. Zmiana wzmocnienia będzie w tym przypadku kompromisem między zwiększoną dokładnością osiągania wartości zadanej a reakcją na skok wartości zadanej ? zostanie to wyjaśnione w dalszej części artykułu. Zadaniem inżyniera sterowania jest ? przy zastosowaniu różnych metod doboru parametrów ? wybór odpowiedniego kompromisu.
Na rysunku 4 przedstawiono wzmocnienie i fazę pętli z większym wzmocnieniem.
Analiza charakterystyki Bodego
Charakterystyka Bodego ukazuje zależność wzmocnienia i przesunięcia fazowego układu od częstotliwości sygnału wymuszającego i pozwala określić obszar stabilnej pracy przy wymaganych marginesach bezpieczeństwa (tzw. zapasie wzmocnienia i zapasie fazy ? przyp. tłumacz.)
 Zapasem fazy jest wartość 360° pomniejszona o fazę pętli, dla której wzmocnienie wynosi 1, natomiast zapas wzmocnienia jest równy wzmocnieniu, przy którym faza osiąga wartość 360°. Pętla, której zapas fazy jest większy niż zero (przesunięcie fazowe jest mniejsze od 360°) jest stabilna. Im jednak zapas fazy jest bliższy zeru, tym bardziej oscylacyjny charakter odpowiedzi układu na skok wartości zadanej. Zapas rzędu 45° zapewnia dobrą stabilność i małe oscylacje. Przy zapasie 60° stabilność układu jest bardzo dobra, a oscylacje są praktycznie niezauważalne. Rysunek 3 przedstawia zapas fazy omawianego układu regulacji.
Zapasem fazy jest wartość 360° pomniejszona o fazę pętli, dla której wzmocnienie wynosi 1, natomiast zapas wzmocnienia jest równy wzmocnieniu, przy którym faza osiąga wartość 360°. Pętla, której zapas fazy jest większy niż zero (przesunięcie fazowe jest mniejsze od 360°) jest stabilna. Im jednak zapas fazy jest bliższy zeru, tym bardziej oscylacyjny charakter odpowiedzi układu na skok wartości zadanej. Zapas rzędu 45° zapewnia dobrą stabilność i małe oscylacje. Przy zapasie 60° stabilność układu jest bardzo dobra, a oscylacje są praktycznie niezauważalne. Rysunek 3 przedstawia zapas fazy omawianego układu regulacji.
Trzeba mieć na uwadze, że w pewnych sytuacjach efektywne wzmocnienie pętli będzie mniejsze ze względu na przekroczenie przez jakiś element układu wartości dopuszczalnego sygnału (nasycenie). Zwróćmy uwagę na zapas fazy z rysunku 5, który dla częstotliwości bliskiej zeru (0,1 Hz) wynosi niemal zero, jeśli wzmocnienie spada o 25 dB. Jeśli skok wartości zadanej wprowadzi jakiś element pętli w nasycenie, układ może wpaść w oscylacje o częstotliwości 0,1 Hz i przestanie oscylować dopiero wtedy, gdy komponenty pętli przejdą do pracy w liniowym zakresie.
Z tego powodu automatyczne układy do zdejmowania charakterystyk Bodego przyjmują za zapas fazy wartość 360° pomniejszoną o największe przesunięcie fazy dla wzmocnienia większego od jedności. Według takiej definicji zapas fazy dla obiektu z rysunku 5 wynosi jedynie 5°. Rysunek 5 przedstawia typową charakterystykę Bodego z zaznaczonym zapasem wzmocnienia i fazy.
Charakterystyka Bodego układu nieliniowego
Niewielka liczba rzeczywistych układów ma liniowy charakter w całym zakresie pracy. Funkcja przejścia liniowego obiektu byłaby linią prostą. Wzmocnienie układu jest mniejsze od jedności na skraju pasma, a w jego środku dochodzi do wartości 2,0.
Analiza Bodego dotyczy układów liniowych. Jeśli system jest nieliniowy, pętla może być stabilna w pewnych zakresach punktów pracy i niestabilna w innych. Z tego powodu należy przeprowadzać analizę dla możliwie zróżnicowanych punktów pracy, które mogą się pojawić w trakcie normalnego działania układu.
Analizę Bodego układów nieliniowych można przeprowadzić, zdejmując serię charakterystyk Bodego dla różnych wartości sygnały zadanego.
Jeśli prostą analizę Bodego układów liniowych kojarzymy z analizą wektora, to analiza Bodego układów nieliniowych będzie analizą powierzchni. Można to zobrazować jako zależność wzmocnienia funkcji przejścia od wielkości sygnału wejściowego (innymi słowy, biorąc pochodną sygnału funkcji przejścia).
Gary L. Pratt jest inżynierem aplikacji w GE Intelligent Platforms
CE