
































 ogłaszają strategiczną współpracę, aby przyspieszyć rozwój centrów danych AI")














Automatyk rozwiązujący zadanie regulacji powinien przede wszystkim sporządzić odpowiedni opis obiektu. Szuka zatem matematycznego modelu w postaci układu zależności zachodzących w procesie, którego rozwiązanie dawałoby wyniki zgodne z obserwacjami. Gdy rozważymy własności statyczne i dynamiczne obiektu, okaże się, że ma on określoną wielkość wejściową i wyjściową, i może być np. scharakteryzowany transmitancją operatorową, odzwierciedlającą jego pełną charakterystykę dynamiczną.
Proces identyfikowania obiektu powinien więc polegać na obserwacji zmian sygnału wyjściowego, który jest odpowiedzią obiektu na wymuszenie, np. funkcją skokową podaną na jego wejście. Otrzymany w ten sposób model wystarcza do opracowania układu sterowania automatycznego i wyznaczenia nastaw regulatora znajdującego się w pętli regulacji wraz z badanym obiektem.
Współczesne oprogramowanie symulacyjne powinno umożliwiać znaczną poprawę efektywności projektowania układów sterowania opartych np. na sterownikach PLC. MATLAB/SIMULINK firmy Math-Works jest jednym z takich ciekawych produktów. Może być wykorzystywany nie tylko przez naukowe grupy badawcze, ale również przez kadrę inżynierską, np. do wspomagania procesu doboru nastaw regulatorów PID.
Rys. 2. Porównanie danych pomiarowych z danymi z modelu obiektu otrzymanego w wyniku identyfikacji dla wymuszenia skokowego: kolor żółty ? obiekt rzeczywisty, kolor fioletowy ? model obiektu.
W praktyce proces taki jest poprzedzony przygotowaniem przez użytkownika odpowiedniego wektora danych. Dla obiektów SISO składa się on ze zbioru punktów pomiarowych sygnału wejściowego i wyjściowego, zarejestrowanych w odpowiednich odstępach czasowych.
Następnie tak przygotowany wektor zostaje przekazany do podprogramu realizującego zadanie identyfikacji obiektu (Identification Toolbox) i w wyniku obliczeń otrzymujemy macierz o specjalnej budowie. Na jej podstawie możemy łatwo (poprzez odpowiednią konwersję) przejść z modelu dyskretnego do modelu o postaci ciągłej:
![]()
Posiadając model obiektu, możemy przystąpić do budowy układu regulacji, który umożliwi nam automatyczny dobór nastaw regulatora.
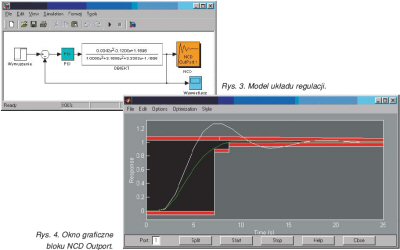
W tym celu w programie SIMULINK zaprojektowano układ (rysunek 3.), do którego dołączono element NCD, który umożliwia modyfikowanie parametrów (w naszym przypadku nastaw P i I regulatora) tak, aby osiągnąć możliwie najlepsze przebiegi czasowe wybranych zmiennych. W NCD nastawy regulatora zostaną dostrojone automatycznie na podstawie zadanego przez użytkownika (w formie graficznych ograniczeń) kryterium jakości (rysunek 4.). Grube, czerwone linie na rysunku określają maksymalne dopuszczalne przeregulowanie, a użytkownik może za pomocąmyszy dowolnie te linie przesuwać, określając w ten sposób kształt przebiegu sygnału wyjściowego.
Optymalizacja w tym przypadku polega na takiej modyfikacji wskazanych parametrów układu, aby wykres sygnału wyjściowego cały mieścił się w zaznaczonym obszarze. Proces ten odbywa się całkowicie automatycznie.
Gdy zostanie wykonany, użytkownik otrzyma szukane nastawy regulatora PI:
-
wzmocnienie P = 0,345,
-
stałą całkowania Ti = 1,379 s.
Otrzymane w procesie symulacji nastawy należy następnie zweryfikować wykorzystując w tym celu np. metodę hardware-in–the-loop, która polega na podłączaniu fizycznego układu automatyki (w naszym przypadku sterownika PLC) do pętli programowej zawierającej komputerowy model obiektu symulowanego w czasie rzeczywistym.
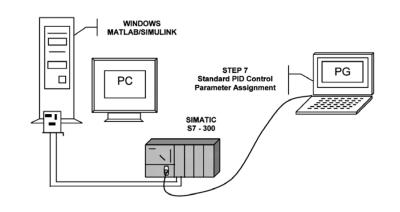
Rys. 5. Schemat połączenia PLC z symulatorem.
Na rysunku 5. pokazana została przykładowa struktura takiego połączenia, które składa się z trzech części:
-
PC z Windows wraz z oprogramowaniem MATLAB/SIMULINK oraz kartą WE/WY analogowych,
-
sterownika PLC realizującego regulację PID oraz moduł WE/WY analogowych,
-
programatora lub PC z oprogramowaniem STEP 7 oraz konfiguratora regulatora PID.
Mając takie środowisko sprzętowe z oprogramowaniem narzędziowym, można zbudować model obiektu w PC. Na rysunku 6. przedstawiony jest schemat blokowy połączenia obiektu w postaci transmitancji WE/WY karty pomiarowej, której zakres napięć odpowiada poziomom napięć modułów analogowych większości sterowników.
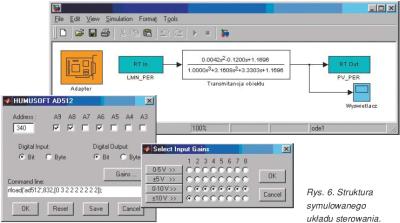
Po stworzeniu takiego układu w programie SIMULINK generowany jest odpowiadający mu kod źródłowy C, który następnie po skompilowaniu, zlinkowaniu z dołączonym sterownikiem karty może zostać wykonany w środowisku Windows w czasie rzeczywistym, z zadeklarowanym czasem próbkowania. Generowanie może być przeprowadzane automatycznie dzięki specjalnemu programowi MATLAB-a ? Real Time Workshop.
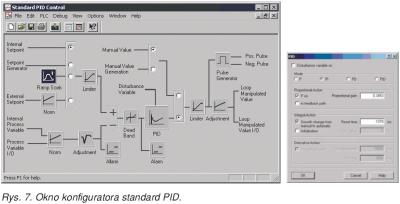
Po zbudowaniu modelu obiektu można przystąpić do wywołania konfigurowania regulatora w PLC. Do realizacji tego zadania zostało użyte oprogramowanie firmy Siemens ? Standard PID Control Parameter Assignment, a jako element wykonawczy wybrano sterownik S7-314IFM, realizujący zadanie regulacji PI.
Program w PLC realizujący połączenie z MATLAB-em powinien:
-
wywoływać specjalny blok funkcyjny realizujący algorytm PI,
-
określać czas próbkowania,
-
definiować wartość zadaną,
-
definiować sygnał wyjściowy regulatora. W następnym kroku należy skonfigurować regulator, określając (rys. 7.):
-
wartość zadaną jako wewnętrzną (z generatora wartości zadanej) lub zewnętrzną odpowiednio znormalizowaną,
-
wielkość wyjściową z obiektu jako wewnętrzny lub zewnętrzny sygnał czytany z odpowiedniego modułu bipolarnego, unipolarnego lub odpowiedniego termoelementu,
-
algorytm PID, w którym określamy: czy ma być brane pod uwagę zewnętrzne zakłócenie, rodzaj algorytmu (P, PI, PD, PID), wzmocnienie regulatora, stałą czasową całkowania oraz stałą różniczkowania regulatora,
-
rodzaj pracy: z zamkniętą automatyczną pętlą regulacyjną lub z ręcznym zadawaniem wielkości sterującej,
-
odpowiednie ograniczenia i dopasowania sygnałów występujących w pętli regulacyjnej.
Tak skonfigurowany regulator w sterowniku zostaje następnie uruchomiony w pętli z symulowanym obiektem w czasie rzeczywistym.
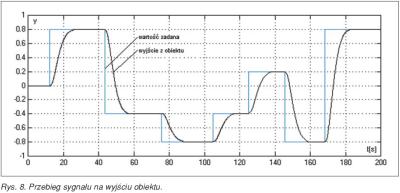
Przebieg zmian wartości zadanej oraz odpowiadający mu przebieg sygnału na wyjściu obiektu przedstawia rysunek 8. Jak widać, nastawy zostały dobrane na tyle poprawnie, że układ nie wykazuje przeregulowań, czyli realizuje założone kryterium jakości.
Znając teoretyczne nastawy (np. otrzymane dla konkretnego obiektu w wyniku symulacji), można łatwo przenieść je do sterownika PLC i przeprowadzić proces weryfikacji w warunkach ?laboratoryjnych?, domowych, co znacznie upraszcza proces projektowania automatyki i oszczędza czas poświęcany na żmudne badania na rzeczywistym obiekcie. W fizycznych układach, w większości przypadków, badania takie są bardzo trudne lub wręcz niemożliwe. Nie zawsze również da się przeprowadzić proces samonastrajania regulatora.
Zastosowanie metody hardware-in-the-loop znacznie wspomaga proces projektowania zarówno prostych, jak i zaawansowanych metod sterowania. Posiadając dobry opis obiektu, np. w postaci transmitancji, równań różniczkowych lub w postaci danych pomiarowych, można przetestować układ regulacji.
Oprogramowanie symulacyjne na podstawie zbudowanego modelu generuje program, który symuluje działanie układu sterowania w środowisku Windows w czasie rzeczywistym. Komunikacja ze ?światem zewnętrznym? odbywa się poprzez moduły analogowe, z jednej strony w PC, a z drugiej w sterowniku PLC. Wszystko odbywa się podobnie jak w fizycznym układzie.
Dostępne rozbudowane narzędzia (np. Fuzzy Logic Toolbox ? logika rozmyta) umożliwiają również stworzenie od podstaw zaawansowanych układów sterowania. Przy dobrej znajomości tych narzędzi i umiejętności przeniesienia ich np. do PLC w fizycznym układzie pozostaje jedynie dostrojenie pewnych parametrów.
Taka metoda wspomagania projektowania ma praktycznie nieograniczone możliwości, a jej zastosowanie może być łatwo rozszerzone na testowanie:
-
zaawansowanych algorytmów PID (z kompensacją opóźnienia, przestrajanym wzmocnieniem, samonastrajających się, wielowymiarowych);
-
algorytmów wykorzystujących metody teorii sterowania (regulatorów optymalnych, regulatorów wykorzystujących model procesu, w tym realizujących sterowanie predyktywne i adaptacyjne);
-
algorytmów sztucznej inteligencji (regulatorów wykorzystujących sztuczne sieci neuronowe, algorytmy genetyczne lub logikę rozmytą).
W dobie specjalizowanych zaawansowanych układów regulacji współczesny inżynier musi sięgać po niekonwencjonalne metody rozwiązywania skomplikowanych problemów automatyki.
Joanna Moczko-Król i Artur Król współpracują z Katedrą Elektrowni i Systemów Pomiarowych Politechniki Opolskiej przy tworzeniu systemu automatyki ogrzewania budynku z wykorzystaniem sterowników PLC.