
































 ogłaszają strategiczną współpracę, aby przyspieszyć rozwój centrów danych AI")














 Odpowiedni wybór sieci automatyki sprzyja wzrostowi niezawodności układów z elementami ruchomymi, pozwala zwiększyć ich prędkość, ułatwia obsługę, serwis i monitoring.
Odpowiedni wybór sieci automatyki sprzyja wzrostowi niezawodności układów z elementami ruchomymi, pozwala zwiększyć ich prędkość, ułatwia obsługę, serwis i monitoring.
Jeżeli jakaś maszyna czy robot jest urządzeniem poruszającym się lub z elementami ruchomymi, wówczas wymaga precyzyjnego sterowania. Istnieją duże szanse, że system automatyki będzie musiał być oparty na cyfrowej sieci szybkiej wymiany danych. Sieci takie charakteryzują się wieloma cechami. Niezwykle istotnymi i przydatnymi w tego typu aplikacjach cechami są: synchronizacja czasowa i transmisji danych, znaczniki czasowe, praca w czasie rzeczywistym, krótkie czasy transmisji, mikrosekundowe opóźnienia. Jednakże zaprojektowanie takiej sieci wymaga fachowego podejścia, mającego na względzie zarówno wysoką niezawodność, maksymalną szybkość transmisji, jak i niskie koszty implementacji oraz użytkowania, łatwość obsługi i serwisu całej sieci.
Wiele aplikacji układów poruszających się optymalizowanych jest w kierunku jak najszybszej reakcji i działania, dzięki czemu wzrasta przepustowość np. linii produkcyjnej. W takich sytuacjach projektowanie sieci automatyki wymaga skupienia się na najdrobniejszych detalach, które mogą mieć wpływ na niezawodność i funkcjonalność sterowanego układu. Informacje zawarte w niniejszej publikacji wskazują, jak zwiększyć niezawodność i szybkość działania sieci sterowania dla układów z elementami ruchomymi, zagwarantować współdziałanie wielu elementów kluczowych w tego typu układach w trakcie eksploatacji, zachowując jednocześnie prostotę ich obsługi i serwisu.
Duża prędkość ? to konieczne
Niemal wszystkie współczesne sieci sterowania w aplikacjach maszyn poruszających się bazują na standardzie sieci Ethernet, jednak zdecydowanie różni się on od powszechnie używanego w tradycyjnych sieciach teleinformatycznych. Różnice dotyczą przede wszystkim warstwy protokołu oraz konstrukcji modułów sieciowych instalowanych w poruszających się elementach maszyn i urządzeń. W większości przypadków każdy taki element będzie miał zainstalowany własny moduł komunikacyjny z mikrokontrolerem, umożliwiający mu komunikację z innymi modułami zintegrowanymi w ramach sieci. Protokół i moduły, jako swego rodzaju ?narzędzia? komunikacyjne, współpracują ze sobą tak, by zoptymalizować sam proces wymiany danych, przyspieszyć go, co ma szczególne znaczenie w aplikacjach maszyn z elementami poruszającymi się. W końcowej ocenie poprawności wykonania systemu sieciowego bazującego na standardzie Ethernet konieczna jest weryfikacja, czy wszystkie założenia i wymogi stawiane sieci przy jej projektowaniu zostały spełnione, gdyż każdy z istotnych parametrów ma znaczenie i może wpływać na funkcjonowanie całej aplikacji. Dobrze dobrana sieć sterowania zagwarantuje, że obsługiwane przez nią urządzenie lub robot będą działać poprawnie, przy maksymalnej prędkości.
Parametrami o zasadniczym znaczeniu dla sieci obsługujących urządzenia poruszające się jest niezawodność i szybkość transmisji danych. Większość współczesnych standardów sieci przemysłowych jest już w stanie zagwarantować bardzo wysoki poziom niezawodności, dlatego też niezawodność całego obsługiwanego procesu zależy zwykle od innych czynników, takich jak zdolność samoczynnego wykrywania błędów i szybkiego powrotu do normalnej pracy po ich wykryciu i ewentualnym usunięciu. Dzięki temu np. produkcja części czy elementów na linii produkcyjnej cechuje się większą wydajnością i dokładnością. W takich warunkach można się pokusić o zwiększenie prędkości realizacji poszczególnych procesów i całej linii produkcyjnej bądź przetwórczej.
 Systemy sterowania dla aplikacji w ruchu organizowane są zwykle w ten sposób, że odpowiednie komendy sterujące wysyłane są z nadrzędnego sterownika do modułów realizujących bezpośrednio akcje ruchu. W rozkazach zawarte są informacje, takie jak: żądana pozycja, prędkość/moment siły. W trakcie realizacji zadania i po jego wykonaniu moduł poruszający się wysyła informację zwrotną do sterownika nadrzędnego, co umożliwia weryfikację poprawności wykonania poszczególnych zadań. Aby cała aplikacja działała poprawnie i szybko, dane przekazywane do modułów i informacje zwrotne muszą dotrzeć na czas i bez żadnych przekłamań. Jeżeli jednak takowe wystąpią (sporadycznie we współczesnych systemach), protokół sieciowy dysponuje narzędziami, które pozwalają na wykrycie defektów i odpowiednią reakcję (np. powielenie rozkazu itp.).
Systemy sterowania dla aplikacji w ruchu organizowane są zwykle w ten sposób, że odpowiednie komendy sterujące wysyłane są z nadrzędnego sterownika do modułów realizujących bezpośrednio akcje ruchu. W rozkazach zawarte są informacje, takie jak: żądana pozycja, prędkość/moment siły. W trakcie realizacji zadania i po jego wykonaniu moduł poruszający się wysyła informację zwrotną do sterownika nadrzędnego, co umożliwia weryfikację poprawności wykonania poszczególnych zadań. Aby cała aplikacja działała poprawnie i szybko, dane przekazywane do modułów i informacje zwrotne muszą dotrzeć na czas i bez żadnych przekłamań. Jeżeli jednak takowe wystąpią (sporadycznie we współczesnych systemach), protokół sieciowy dysponuje narzędziami, które pozwalają na wykrycie defektów i odpowiednią reakcję (np. powielenie rozkazu itp.).
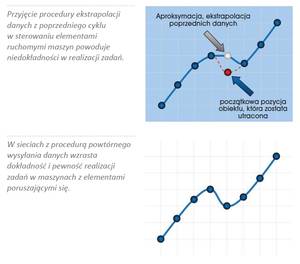
W pierwszym z prezentowanych przykładów (rysunek 1) aplikacja sterowana jest numerycznie. Poprawność działania komputera dokonującego niezbędnych obliczeń numerycznych ściśle zależy od poprawności danych docierających do modułów poruszających w obsługiwanym urządzeniu, a wszelkie braki przekładają się bezpośrednio na zaburzenie jej funkcjonowania. Jeżeli jakikolwiek pakiet danych zostanie pominięty, system korzysta z poprawnych danych z poprzedniego pakietu lub dokonuje ekstrapolacji na podstawie tych danych, obliczając zastępcze nastawy/dane. Taka sytuacja może niekorzystnie wpłynąć np. na jakość wytwarzanych produktów. Podstawowe rozwiązanie problemu utraty pojedynczych pakietów danych jest stosunkowo proste: w przypadku pojawienia się błędu lub braku danych maszyna powinna być zatrzymana i przywrócona ponownie do ruchu przy prawidłowej komunikacji. Wadą tego typu podejścia jest jednak konieczność wielokrotnego, częstego ponownego uruchamiania maszyny w sytuacji, gdy system sterowania byłby wysoce wrażliwy na oddziaływanie zaburzeń zewnętrznych lub technicznie cechował się częstą utratą czy przekłamywaniem sygnałów sterujących.
Dlatego też lepszym rozwiązaniem jest zastosowanie w takich aplikacjach systemu sterowania bazującego na komunikacji sieciowej, chociażby z funkcją ponownej transmisji rozkazu lub potwierdzenia w razie uszkodzenia jakiegoś pakietu danych. Na przykład sieć typu Mechatrolink, dedykowana dla aplikacji z elementami poruszającymi się, wyposażona jest w narzędzie sprawdzające, czy wszystkie moduły wykonawcze otrzymują rozkazy ze sterownika nadrzędnego i czy potwierdzenie następuje natychmiast po ich otrzymaniu. Jeżeli któryś z modułów otrzyma niepoprawne dane, system może automatycznie wygenerować powtórnie ten pakiet, zaadresowany tylko do tego konkretnego modułu, który otrzymał dane niepoprawne lub nie otrzymał ich w ogóle. Co warte podkreślenia, powtórzone dane wysyłane są w tym samym cyklu co dane pierwotne, dzięki czemu możliwe jest wykonanie całego cyklu rozkazów, bez żadnych aproksymacji czy interpolacji (rysunek 2). Opisana funkcjonalność gwarantuje otrzymanie pełnej sekwencji danych dla wszystkich modułów poruszających urządzenie w każdym cyklu czasowym, co pozwala na wykorzystanie ich nawet w środowiskach przemysłowych charakteryzujących się dużymi poziomami sygnałów zaburzających.
Rzeczywista szybkość transmisji w sieciach
 Standardową prędkością transmisji danych w sieciach dedykowanych dla aplikacji poruszających się, takich jak: Mechatrolink, SERCOS, Profinet EtehrNet/IP jest zwykle 100 Mbps. Wymagania co do zakresu i szybkości regulacji prędkości poruszania się modułów w aplikacji zależą bezpośrednio od tego, jak szybko system sterowania może realizować sekwencje operacji w kolejnych cyklach czasowych.
Standardową prędkością transmisji danych w sieciach dedykowanych dla aplikacji poruszających się, takich jak: Mechatrolink, SERCOS, Profinet EtehrNet/IP jest zwykle 100 Mbps. Wymagania co do zakresu i szybkości regulacji prędkości poruszania się modułów w aplikacji zależą bezpośrednio od tego, jak szybko system sterowania może realizować sekwencje operacji w kolejnych cyklach czasowych.
O tym, jak długo trwa pojedynczy cykl w sieci, decydują dwa podstawowe parametry: ilość danych transmitowanych do każdego sterowanego modułu oraz całkowita liczba tych modułów w aplikacji. Większość, jeśli nie wszystkie, sieci sterowania bazujące na standardzie Ethernet umożliwiają zmianę ilości transmitowanych danych zależnie od wymagań poszczególnych aplikacji.
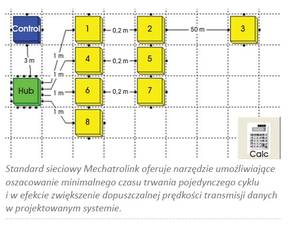
Rzeczywista szybkość transmisji danych w większości sieci ethernetowych jest nie do ustalenia, uwzględnia bowiem cały szereg zmieniających się parametrów sieci, determinujących rzeczywisty czas trwania cyklu transmisji. Niektóre organizacje (np. Mechatrolink) oferujące sieci sterowania dla aplikacji przemysłowych, dostarczają też pewne narzędzia komputerowe, pozwalające użytkownikowi na wprowadzenie modelu architektury sieci i obliczenie czasu trwania cyklu (rysunek 3). W takiej symulacji uwzględniana jest ilość danych konieczna do wysłania do każdego modułu w aplikacji, całkowita liczba takich modułów, długość kabli sieciowych między modułami i sterownikami, liczba koniecznych hubów oraz czasy opóźnienia przetwarzania sygnałów w modułach. Dzięki symulacji możliwe jest uzyskanie odpowiedzi, czy dany typ sieci i jej projektowana architektura zapewnią właściwe funkcjonowanie systemu sterowania, wraz z wymaganą szybkością transmisji danych.
Jeszcze jednym ważnym czynnikiem decydującym o wyborze konkretnego typu sieci dla aplikacji z elementami ruchomymi jest dostępność kompatybilnych z systemem modułów i komponentów sieciowych. Większość producentów maszyn i robotów dla takich aplikacji ma swoich preferowanych dostawców elementów automatyki, bowiem integralność i kompatybilność wszystkich modułów składowych jest w tego typu aplikacjach czynnikiem krytycznym.
Znaczenie kompatybilności
Organizacje oferujące różne rozwiązania sieci sterowania, bazujące na standardzie Ethernet, najczęściej oferują integratorom i użytkownikom odpowiednie narzędzia dla modułów sieciowych, testujące ich kompatybilność i zdolność do współpracy w danej sieci. Zwykle urządzenia posiadające taką zdolność są wyposażone w odpowiednie logo na obudowie, jednoznacznie wskazujące na możliwość wykorzystania w określonym standardzie sieciowym. Potwierdza ono również uzyskanie pozytywnych wyników testów kompatybilności przeprowadzonych przez producenta.
Dla przykładu, jeżeli dany system sterowania i monitoringu składa się ze sterownika nadrzędnego, zdalnych modułów we/wy, podsystemu wizyjnego i kilku serwonapędów, zwykle najlepsze osiągi i najniższą cenę takiej aplikacji uzyskuje się dzięki zakupowi rożnych modułów od różnych producentów i dostawców. Takie działanie jest możliwe tylko wówczas, gdy integracja systemu oparta jest na wymianie danych w ramach standardu komunikacji cechującego się szerokim spektrum kompatybilności, a najlepiej, jeżeli jest to tzw. standard otwarty, czyli niezwiązany ściśle z konkretną technologią, firmą czy dostawcą.
Trzeba jednak pamiętać, że nawet najlepiej dobrane w trakcie projektowania aplikacji urządzenia systemowe mogą przynieść różne niespodzianki w fazie ich faktycznego łączenia i integracji (komisjonownia) w sieci. Na przykład jeden z modułów zdalnych we/wy czy kamera systemu wizyjnego mogą mieć ukrytą wadę czy nieco odbiegające od innych urządzeń parametry, zwłaszcza w stosunku do tych zakładanych w fazie projektowej. W takich sytuacjach pełna tzw. interoperacyjność systemu daje możliwość wymiany takich elementów, bez większego wpływu na funkcjonowanie i wydajność pozostałych modułów.
Jedną z cech standardu Etehrnet jest zdolność przenoszenia informacji pochodzących z różnych protokołów (np. tunelowanie), dzięki czemu standard ten umożliwia integrację sieci wielu standardów w jednym systemie. Nie ma jednak róży bez kolców ? takie łączenie i mieszanie protokołów sieciowych może generować dodatkowe problemy. Sieci bazujące na standardzie Ethernet są znacznie bardziej stabilne w przypadku obsługi tylko jednego lub ewentualnie dwu standardów sieciowych, niż przy ich znacznym nagromadzeniu. Niektóre sieci ethernetowe dla aplikacji z elementami poruszającymi się mają np. wbudowane dwa rodzaje protokołów komunikacji, z których jeden jest priorytetowy w stosunku do drugiego.
Powyższe problemowe kwestie nie dotyczą na szczęście tych najbardziej popularnych standardów sieciowych dla aplikacji z obsługą elementów ruchomych ? Mechatrolink, SERCOS, Profinet i EtherNet/IP. Każdy z nich stanowi bowiem w zasadzie odrębny, kompletny protokół wymiany danych, testowany w oparciu o ustalone procedury, a przeznaczone dla nich moduły systemowe oznaczone są stosownymi znakami logo, potwierdzającymi ich kompatybilność z danym standardem. Wszystko to gwarantuje pełną zdolność współdziałania takich komponentów, nawet pochodzących od różnych producentów czy dostawców.
Zarządzanie siecią i serwis bez wyłączania
Jeszcze jednym istotnym aspektem, o którym należy pamiętać przywyborze standardu sieci automatyki do obsługi urządzeń ruchomych, jest prostota użytkowania, serwisowania i zarządzania siecią. Jak już wspomniano wcześniej, dobrze dobrana sieć komunikacyjna może przyspieszyć działanie aplikacji i ułatwić pracę z całym systemem poprzez zautomatyzowane procedury wykrycia i usuwania błędów. Standardowymi procedurami w takich sytuacjach jest w wielu jeszcze zakładach wyłączanie linii produkcyjnej lub wybranych urządzeń, w celu przeprowadzenia prac serwisowych czy usunięcia awarii. Takie działanie jest wręcz konieczne w przypadku korzystania z sieci automatyki wymagających każdego resetu, jeżeli jakikolwiek element sieci zostanie z niej wyłączony lub pojawi się znaczący błąd w komunikacji danych.
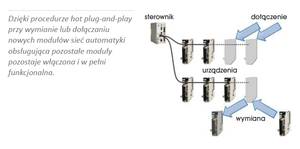
Znacznie bardziej efektywną procedurą zarządzania siecią jest umożliwienie ciągłego funkcjonowania maszyny lub urządzenia dzięki skorzystaniu z metody hot plug-and-play ? serwisu przy zachowaniu funkcjonalności urządzenia. Wiele sieci automatyki dedykowanych dla aplikacji z elementami ruchomymi, w tym wymieniane już wcześniej popularne standardy, zapewnia obsługę takiej metody serwisowania. Dzięki niej moduły sterownicze mogą być łatwo wymieniane czy dodawane do systemu, bez konieczności przerywania komunikacji w systemie automatyki między sterownikiem nadrzędnym i pozostałymi modułami sieciowymi (rysunek 4). Taka architektura systemu, wraz z pomocniczymi narzędziami serwisu i zarządzania, znacznie ułatwia samą implementację systemu oraz jego późniejsze użytkowanie czy modernizację.
CE