















































Trzecia funkcja algorytmu regulatora PID jest w zasadzie zrozumiała. Funkcja różniczkująca, potocznie nazywana też wyprzedzeniem, okazuje się w wielu przypadkach bardzo pożyteczna. Niemniej jeśli zastosujemy ją w niezbyt przemyślanym przypadku, może nas przyprawić o poważny ból głowy.
Prawdopodobnie znane jest każdemu powiedzenie, że ?niedostatek wiedzy jest niebezpieczny?. To powiedzenie sprawdza się w przypadku obwodów z regulacją PID, szczególnie kiedy próbujemy wykorzystać akcję różniczkującą. Ten element algorytmu regulacyjnego może usprawnić panowanie nad przebiegiem regulowanego procesu, ale tylko we właściwych sytuacjach oraz gdy jest odpowiednio nastawiony i skierowany. Rozpoznanie sytuacji, których to dotyczy, jest uzależnione od zrozumienia, jak działa regulacja według algorytmu PID, jaką rolę odgrywają te trzy funkcje.
Akcja proporcjonalna (P) regulatora jest jego wymuszoną odpowiedzią na wystąpienie błędu w procesie i jej intensywność jest proporcjonalna do wielkości tego błędu. Główną wadą tej akcji jest to, że im mierzony parametr regulowanego procesu jest bliższy wartości zadanej, to wysiłek regulatora (wartość sygnału korygującego) jest mniejszy, bo proporcjonalny. Powoduje to ciągłe asymptotyczne zbliżanie się do wartości zadanej, lecz nigdy nie dochodzi do jej osiągnięcia, zawsze pozostawiając odchyłkę po tej samej stronie od wartości zadanej.
Akcja całkująca (I) regulatora pozwala na doprowadzenie wartości rzeczywistej regulowanego parametru na drugą stronę, poza wartość zadaną (np. z 98% do 102% wartości zadanej, co oznacza, że uchyb regulacji zmieni znak naprzeciwny). Ta właściwość eliminuje niedostatek akcji P i pozwala na sprowadzenie uchybu do wartości zerowej. W wielu sytuacjach (jeśli nie w większości) regulowany proces przebiega doskonale właśnie przy zastosowaniu regulacji z algorytmem PI. Na wykresie 2, ilustrującym tradycyjną metodę strojenia regulatora, wyraźnie obserwujemy oscylowanie wartości rzeczywistej procesu wokół wartości zadanej, przy czym w każdym cyklu wartość odchyłki zostaje zredukowana o 75% swej poprzedniej wartości (tak zwana ćwierćfala). W praktycznych zastosowaniach, wymagających możliwie najszybszych reakcji regulatora na powstałą odchyłkę, taki sposób działania regulatora jest dla inżynierów automatyków najbardziej satysfakcjonujący.
Jednakże nie możemy tak postąpić podczas regulowania przebiegu procesu w takim przypadku, gdy musimy ściśle utrzymać temperaturę w zbiorniku z ciekłym produktem. Wiemy przy tym, że przekroczenie wartości zadanej w dół przez temperaturę tego produktu może grozić jego zniszczeniem, a w górę np. zapaleniem. Jaki zatem powinien być algorytm regulacji, aby szybko zlikwidować odchyłkę regulacji, nie doprowadzając do znacznego przekroczenia temperatury produktu ponad wartość zadaną? Poprawną odpowiedzią jest wprowadzenie akcji różniczkującej (D).
Akcja różniczkująca regulatora jest swego rodzaju hamulcem*) w prowadzeniu procesu. Im bardziej regulator próbuje zmienić wartość rzeczywistą regulowanego parametru, tym bardziej zdecydowane jest oddziaływanie hamujące akcji różniczkującej. Popatrzmy na wykres 3, dla wybranego, przykładowego procesu, czyli utrzymania temperatury cieczy w zbiorniku. Temperatura cieczy rośnie w odpowiedzi na zmianę wartości zadanej**), na początku niemal gwałtownie, lecz im bardziej zbliża się do wartości zadanej, zachowuje się coraz łagodniej i doprowadza do minimalnego przekroczenia wartości zadanej. Jest to działanie porównywalnie szybkie jak przy algorytmie PI (bez funkcji D), jednak likwiduje oscylacje, zaś przy trafnie dobranym parametrze akcji różniczkującej (czasie wyprzedzenia TD) szybciej stabilizuje przebieg procesu po zakłóceniu, niż to ma miejsce w poprzednim przypadku.
Automatyk Bob Rice, specjalista rozwiązań inżynierskich, następująco reasumuje te trzy akcje algorytmu regulacji: ? Akcja proporcjonalna obserwuje przede wszystkim, w którym miejscu (w odniesieniu do wartości zadanej) znajduje się wartość regulowanego parametru. Akcja całkująca koncentruje uwagę na tym, jaka wartość parametru była przed momentem, natomiast akcja różniczkująca próbuje przewidzieć, dokąd zmierza wartość parametru. Akcja różniczkująca regulatora staje w opozycji do zmian wymuszanych przez akcje: proporcjonalną i całkującą. O ile akcje P oraz I są zgodne co do kierunku działania, to akcja D przeciwstawia się im. Funkcje P oraz I regulatora nakazują zmiennej regulowanej: ?idź w tym kierunku?, funkcja D regulatora podpowiada: nie spiesz się zbytnio, przyhamuj. Dodajmy przy tym, że wartości liczbowe nastaw parametrów PID określają szybkość (I, D) lub intensywność (P) działania tych funkcji. Z reguły większe znaczenie ma działanie różniczkujące w procesach szybkozmiennych.
Funkcje regulatora działają tylko w razie potrzeby
Jeśli chcemy przewidzieć, jak powinien zachować się regulator w określonej sytuacji, najpierw musimy przeanalizować, jak działa każda z akcji regulatora w określonym momencie. Popatrzmy na pierwszy wykres, widzimy, że operator nagle (skokowo) podniósł wartość zadaną o pewną wielkość. Teraz popatrzmy, jaka jest odpowiedź obiektu na sygnał korygujący regulatora (niepokazany na rysunkach). Po pierwsze zauważamy, że regulowany parametr niemal natychmiast zareagował na nagłe pojawienie się odchyłki, w czym miały swój udział głównie funkcje P oraz D regulatora, bowiem w pierwszym momencie funkcja I jest w stosunku do poprzednich mniej agresywna. Regulator wymusza nadążanie regulowanego parametru za zmianą wartości zadanej odpowiednio do nastawy swoich parametrów dla obu akcji, proporcjonalnej i różniczkującej. Impuls akcji D szybko zaczyna opadać, zaś w miarę zbliżania się do wartości docelowej słabnie też stopniowo akcja P. Z kolei akcja całkująca wzmaga ruch zgodny z kierunkiem oddziaływania funkcji P przez cały czas, gdy tylko regulowany proces jest poniżej wartości docelowej. Kiedy regulowany parametr wciąż jeszcze szybko się zmienia (krzywa na wykresie dalej ostro pnie się w górę), rozpoczyna swoje hamujące działanie akcja różniczkująca (D), spowalniając tempo przyrostu wymuszanego akcjami P oraz I.
W pewnej chwili regulowany parametr osiągnie wartość zadaną jako odpowiedź na sygnał korygujący wysyłany przez regulator w chwili wcześniejszej o czas zwany zwłoką (rezultat bezwładności obiektu), bo regulator ?dowiaduje? się o tym fakcie dopiero po upływie czasu zwłoki obiektu. Przez ten czas akcje, proporcjonalna i całkująca, chociaż zanikające, lecz aktywne, spowodowały, że wartość regulowanego parametru przekroczyła wartość zadaną. Pojawia się błąd o przeciwnym kierunku. Mamy do czynienia z przeregulowaniem. W ślad za tym uaktywnia się ponownie, lecz przeciwnie skierowana funkcja P, skierowując obiekt do powrotu w dół ku wartości zadanej.
Podobnie zmienia kierunek funkcja I, lecz obie te funkcje mają opóźnioną informację o potrzebie zakończenia swojej aktywności. Dochodzi do kolejnego przekroczenia linii wartości zadanej i cała ?zabawa? powtarza się przy zmienionym kierunku. Na szczęście omawiane wcześniej hamujące oddziaływanie funkcji D zdecydowanie korzystnie wygasza powstałe oscylacje. Wszystkie funkcje regulatora działają tym intensywniej, im większa jest odchyłka regulacji. Niemniej stopień intensywności odpowiedzi jest także nastawiany przez operatora: wartością wzmocnienia (XP ? dla funkcji P), czasem zdwojenia (TI ? dla funkcji I) oraz czasem różniczkowania (TD).
Sztuka strojenia regulatora w obwodzie automatycznej regulacji polega na wyborze optymalnych nastaw parametrów poszczególnych funkcji dla najkorzystniejszego prowadzenia konkretnego procesu, w którym występuje często więcej niż jedna wartość regulowana, przy tym każda z nich ma inne cechy charakterystyczne.
Dobieranie wartości nastaw
Jaka wartość nastawy funkcji D jest właściwa, jeżeli głównym celem ma być hamujące oddziaływanie na pozostałefunkcje? Dla szybko zmieniających się parametrów, takich jak natężenie przepływu lub ciśnienie, akcja D potrzebna jest rzadko. Przy bezwładności obiektu rzędu sekund do jednej lub dwóch minut, przyspieszenie momentu ustabilizowania się o 10% nie jest znaczącym osiągnięciem. Jak to uprzednio było wspomniane, w obwodach wolnych celowe jest użycie akcji D, gdy wystąpienie znacznego błędu przez dłuższą chwilę jest niepożądane lub groźne.
B. Rice sugeruje: ? W przypadku obwodów regulacji powolnych obiektów, o czasie opóźnienia odpowiedzi (zwłoki) rzędu 20 do 30 minut, łatwiej jest przewidywać zachowanie przyszłe. Jednakże jeśli mamy do czynienia z obiektem szybkim, w którym kolejne pomiary wartości regulowanej wskazują zmianę trendu w przeciwnym kierunku w krótkim czasie, użycie akcji różniczkującej nie daje żadnej korzyści. Jeśli regulowane parametry mają skłonność do odchylania się od zadanej wartości, ale są przy tym bardzo wolne, wtedy można się spodziewać znaczących korzyści z funkcji różniczkującej. Układ regulacji temperatury przy wypieku ma charakter jednostronny, możemy tylko stosować podgrzewanie, nie mając żadnych możliwości chłodzenia. W innym przypadku może być akurat odwrotnie, możemy tylko ochładzać bez możliwości grzania.
Przy takich procesach znaczne przeregulowanie jest niedopuszczalne, bo nie mamy możliwości przeciwdziałania, produkt ulega na przykład przypaleniu. Wtedy należy użyć akcji D, aby mieć pewność, że nie dopuścimy do przeregulowania.
Czy to znaczy, że w większości przypadków niepotrzebna jest funkcja D? Prawdopodobnie nie.
Tak uzasadnia to B. Rice: ? Poza przytoczonymi przed chwilą obiektami regulacji, w praktyce około 90% obwodów regulacyjnych to obwody z regulatorem o algorytmie PI. Takie rozwiązanie jest wystarczające w większości przypadków i jest przy tym prostsze. Dobrze nastrojony regulator PI będzie zawsze lepszy od średnio nastrojonego regulatora PID. Dodanie trzeciej niezależnie strojonej funkcji regulatorowi komplikuje posługiwanie się nim, a to może prowadzić do konfuzji wielu operatorów. W końcu dotyczy to tylko pozostałych około 10% przypadków, prawdziwie powolnych procesów wymagających hamującego oddziaływania akcji różniczkującej. Ale przecież można w nich zastosować mikroprocesorowe regulatory zaawansowanej regulacji, w których łatwiej dodawać funkcje różniczkowania w celu uniknięcia przeregulowań lub oscylacji.
George Buckbee, specjalista w firmie ExperTune, ostrzega, że tradycyjne metody dobierania nastaw parametrów regulatora nie powinny być uznawane za uniwersalne dla każdego przypadku. ? Przyjęcie za pewnik, że zalecenia Zieglera-Nicholsa dotyczące nastaw regulatora gwarantują uzyskanie ?ćwierćfalowego? tłumienia oscylacji (spadek amplitudy przeregulowań o 75% w każdym cyklu) jest błędem ? twierdzi i jednocześnie doradza. ? Kryteria poprawnego doboru nastaw mogą się zmieniać z obwodu na obwód, lecz zazwyczaj jest to najszybszy sposób doprowadzenia do usunięcia odchyłki regulacji przy mniejszym ryzyku i bez cyklicznych przeregulowań. Należy rozważnie dobierać te kryteria i zdefiniować je dla każdego obwodu oddzielnie.
Jak to można zaobserwować na wykresie 3, tego rodzaju rezultaty mogą zostać osiągnięte przy zastosowaniu funkcji różniczkującej. Niemniej, jak to podkreśla G. Buckbee, każdy obwód wymaga indywidualnego strojenia parametrów funkcji regulatora.
Funkcja D jako zabezpieczenie
Wszystko, co powyżej opisano, ma bardzo pozytywny wydźwięk, zatem w czym tkwi problem?
G. Buckbee porównuje opisy działania funkcji różniczkowania: ? Ta funkcja to jak próba jazdy samochodem z jedną nogą opartą na pedale przyspieszenia, a drugą na hamulcu. Dla mojego 16-letniego syna, który właśnie uczy się prowadzić samochód, jest to pierwsza rzecz, jakiej chce się nauczyć. Taki sposób jazdy mógłby być właściwy dla wykwalifikowanego rajdowca, lecz obwody automatycznej regulacji nie wymagają aż tak natychmiastowych ani gwałtownych działań.
Różniczkowanie ma tendencje do szybkiego działania, lecz stąd się bierze większość kłopotów. ? Kiedy funkcja zauważa, że wartość regulowanego parametru wzrasta lub opada, stara się od razu reagować, nawet jeśli taka zmiana jest tylko szumem, a nie prawdziwym zakłóceniem w przebiegu procesu. G. Buckbee dodaje też: ? Akcja D, dostrzegająca szybkie chwilowe zmiany wartości zmiennej regulowanej, reagowałaby na szumy. Ostatni pomiar wykazał odchylenie w górę o 1%, następny pomiar ? odchylenie w dół o 1%. W takiej sytuacji akcja D uznaje oba te objawy za symptomy wymagające odpowiedzi. Regulator spróbuje skompensować tę odchyłkę i uderzeniowo będzie poruszał zaworem.
Ten rodzaj funkcjonowania akcji D miałby jeden główny skutek, szybkie zużycie zaworu. Da się to porównać z przemiennym naciskaniem na pedały przyspiesznika i hamulca lub jeszcze gorzej, jazdę przy jednoczesnym wciśnięciu obu tych pedałów. Szybko zniszczymy każde urządzenie. Skutecznym rozwiązaniem, przynajmniej w niektórych przypadkach, jest zastosowanie filtrowania wyników pomiaru (aktualnej wartości regulowanego parametru) dla wyeliminowania szumów. Niestety, likwidując jeden kłopot, możemy wywołać nowy. Oto kolejny fragment wypowiedzi G. Buckbee: ? Jeżeli zachodzi potrzeba skoordynowania działania funkcji D regulatora z parametrami określającymi zakres filtrowania sygnału wartości mierzonej, należy to zrobić. Jeśli filtrowanie będzie zbyt szerokie, może całkowicie zablokować działanie różniczkujące. Nie można zatem ustalać zakresu filtrowania i parametrów funkcji D niezależnie.
Ostrzeżenie wyraża także B. Rice, mówiąc: ? W wielu regulatorach akcja różniczkowania ma wbudowany element filtrowania sygnału z pomiaru wartości regulowanej. Takie regulatory mają wtedy cztery oddzielne parametry strojenia, są to: P, I, D, a czwartym jest czas zwłoki dla filtrowania przed akcją D. Fakt istnienia w regulatorze funkcji filtrowania dla akcji różniczkującej jest niestety często pomijany w informacjach producenta o konkretnym regulatorze. Z kolei inni producenci, zamiast podać istnienie dwóch możliwości działania akcji D (z filtrowaniem lub bez) w swoim regulatorze, podają skomplikowany algorytm jego wszystkich funkcji, tworząc kilkanaście lub nawet więcej odmian, pośród których przeciętny użytkownik łatwo może się zagubić i wybrać niepoprawną kombinację funkcjonowania regulatora.
Destabilizujące działanie różniczkowania
Nawet w sytuacjach, kiedy regulowany proces toczy się powoli (ma dużą bezwładność) i swoim opisem pasuje do tutaj omawianych, należy zachować ostrożność. B. Rice zaleca, aby w przypadku zbyt intensywnego działania hamującego akcji D podnieść (zmianą nastaw) intensywność akcji P oraz I. Pozwoli to na zrekompensowanie hamującego działania różniczkującego i jest podobne do próby przyspieszenia ruchu samochodu przy lekko wciśniętym hamulcu.
? Jeżeli mamy do czynienia z obiektem podobnym do powolnego obwodu regulacji temperatury cieczy w zbiorniku, operatorzy procesu skłaniają się do nastawiania silnej akcji różniczkującej, ponieważ nie lubią przeregulowań. Wyobrażają sobie, jaki będzie efekt końcowy, jeśli nastawią umiarkowane działanie proporcjonalne i spokojne całkowanie, natomiast akcja różniczkująca będzie cały dzień z nimi walczyła. Jeśli w naszym obwodzie regulacji wystąpi zakłócenie, naszym dążeniem będzie szybkie usunięcie jego skutków, lecz zbyt wolna akcja różniczkująca może to utrudniać, będzie bowiem przeciwdziałać próbie szybkiej zmiany w obiekcie sygnałem korygującym. Zbyt duży czas różniczkowania w stosunku do innych funkcji regulatora będzie niwelował działanie tych funkcji. Do takiego stanu nigdy nie należy dopuścić ? twierdzi B. Rice.
W konkluzji trzeba stwierdzić, że użycie akcji D regulatora może okazać się korzystne, lecz musi to być zastosowane we właściwej sytuacji oraz przy przemyślanym poprawnym nastawieniu czasu tej akcji. Początkowe założenia muszą zostać zweryfikowane przez zachowanie się regulowanego parametru. Najpierw należy sprawdzić, czy sam algorytm PI jest wystarczający dla naszych oczekiwań. Przyczyny do zalecania takiego postępowania zostały powyżej omówione. W pewnych warunkach staranne nastawienie akcji proporcjonalnej i całkującej może wystarczyć do prowadzenia procesu technologicznego, bez znaczących przeregulowań. Wypróbowanie takiej możliwości wydaje się najlepszym podejściem do problemu. Dołączanie akcji różniczkującej należy czynić z rozwagą, zalecane jest wykorzystanie możliwości filtrowania sygnału wartości mierzonej. To tak, jak przy dodawaniu pikantnych przypraw do posiłku; właściwa ilość może dać nadzwyczajny skutek, przesada prowadzi do katastrofy.
Działanie akcji różniczkującej regulatora
Vance VanDoren
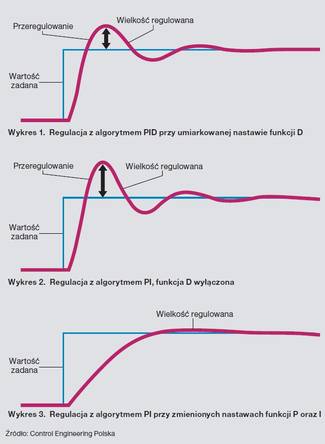 John Ziegler i Nathaniel Nichols, nazywani ojcami strojenia regulatorów PID, opracowali i opublikowali w 1942 r. wyniki swoich dociekań i praktycznych prób z regulatorami o trzech funkcjach: P, I oraz D w obwodach automatycznej regulacji. Dali też praktyczne zalecenia do strojenia regulatorów. W tych zaleceniach jest także sugestia doboru czasu akcji różniczkującej, optymalne jest ustawienie go na poziomie połowy czasu zwłoki w odpowiedzi regulowanego obiektu na sygnał korygujący wysłany z regulatora. Wykres 1 pokazuje odpowiedź obiektu na zmianę wartości zadanej w rezultacie działania regulatora z włączonymi trzema funkcjami, przy nastawach wynikających z tak zwanej reguły Zieglera-Nicholsa. Środkowy wykres 2 ilustruje odpowiedź tego samego obiektu na takie samo zakłócenie przy wyłączonej akcji D (regulacja wg algorytmu PI). W tym przypadku widać wyraźnie równie szybki wzrost odpowiedzi obiektu oraz powiększenie się wartości przeregulowania (przekroczenia przez obiekt wartości zadanej i powstanie błędu o przeciwnym znaku). Jak na ironię okazuje się, że owo przeregulowanie można prawie całkowicie wyeliminować, wyłączając funkcję różniczkowania, jednak przy zmniejszeniu nastawy proporcjonalności i powiększeniu czasu całkowania. Ilustruje to wykres 3, w którym mamy wyłącznie działanie PI przy nastawach: proporcjonalność 69% natomiast czas całkowania równy czasowi zwłoki odpowiedzi obiektu. Akcja różniczkująca okazała się zbędna, skutecznie wyeliminowano przeregulowanie samą zmianą nastaw akcji P oraz I.
John Ziegler i Nathaniel Nichols, nazywani ojcami strojenia regulatorów PID, opracowali i opublikowali w 1942 r. wyniki swoich dociekań i praktycznych prób z regulatorami o trzech funkcjach: P, I oraz D w obwodach automatycznej regulacji. Dali też praktyczne zalecenia do strojenia regulatorów. W tych zaleceniach jest także sugestia doboru czasu akcji różniczkującej, optymalne jest ustawienie go na poziomie połowy czasu zwłoki w odpowiedzi regulowanego obiektu na sygnał korygujący wysłany z regulatora. Wykres 1 pokazuje odpowiedź obiektu na zmianę wartości zadanej w rezultacie działania regulatora z włączonymi trzema funkcjami, przy nastawach wynikających z tak zwanej reguły Zieglera-Nicholsa. Środkowy wykres 2 ilustruje odpowiedź tego samego obiektu na takie samo zakłócenie przy wyłączonej akcji D (regulacja wg algorytmu PI). W tym przypadku widać wyraźnie równie szybki wzrost odpowiedzi obiektu oraz powiększenie się wartości przeregulowania (przekroczenia przez obiekt wartości zadanej i powstanie błędu o przeciwnym znaku). Jak na ironię okazuje się, że owo przeregulowanie można prawie całkowicie wyeliminować, wyłączając funkcję różniczkowania, jednak przy zmniejszeniu nastawy proporcjonalności i powiększeniu czasu całkowania. Ilustruje to wykres 3, w którym mamy wyłącznie działanie PI przy nastawach: proporcjonalność 69% natomiast czas całkowania równy czasowi zwłoki odpowiedzi obiektu. Akcja różniczkująca okazała się zbędna, skutecznie wyeliminowano przeregulowanie samą zmianą nastaw akcji P oraz I.
Artykuł pod redakcją Józefa Czarnula.
*) Autor artykułu analizuje wpływ akcji regulatora (P, I, D) na podstawie wykresu ilustrującego zachowanie się regulowanego parametru, przy tym wybrał obiekt o bardzo dużej bezwładności ? temperatura cieczy w zbiorniku. Patrząc na wykres 3 nie jesteśmy w stanie ocenić, jaki wpływ na pochylenie krzywej ilustrującej odpowiedź obiektu wywierają kolejne funkcje składowe działania regulatora. Faktem jest jednak, że przy właściwym doborze nastaw najpoważniejsza składowa impulsu korygującego (wyjścia z regulatora) w pierwszym momencie pochodzi od akcji D. Ponieważ funkcja różniczkowania daje na początku bardzo wysoki impuls, choć trwa on stosunkowo bardzo krótko. Przy obiekcie o bezwładności rzędu kilku do nawet kilkudziesięciu minut (typowe dla temperatury cieczy w zbiorniku) czas trwania tego impulsu od akcji D stanowi kilka do kilkunastu procent czasu cyklu od zakłócenia do ustabilizowania się obiektu. Przez pozostały czas, czyli ponad 80% tego okresu, trwa ?akcja hamująca?, czyli hiperboliczne opadanie wartości impulsu pochodzącego z akcji D. Właśnie ten odcinek ma kierunek przeciwny do kierunku działania wynikającego z funkcji P oraz I regulatora, o czym mówi autor artykułu i jego rozmówcy.
Przestrzegam zatem Czytelników przed próbą przeniesienia wniosków z wolnego obiektu na szybki, w którym najsilniej ujawniają się cechy akcji D ? jako przyspieszającej. Takimi są poziom oraz ciśnienie w walczaku kotła elektrowni. Tutaj bezwładność (opóźnienie odpowiedzi) obiektu mierzy się w pojedynczych sekundach. Podobnie szybkim obiektem jest warstwa fluidalna w palenisku kotła elektrowni czy stacja wyparna w cukrowni. Podaję tylko te, dobrze mi znane z autopsji (przyp. red.).
**) Na wykresach ukazano zachowanie się regulowanego parametru przy zaistnieniu uchybu regulacji (błędu). Ten uchyb regulacji został sztucznie wywołany przez nagłą (skokową) zmianę wartości zadanej. W warunkach rzeczywistych z reguły mamy do czynienia z sytuacją odwrotną: wartość zadana jest stała lub łagodnie zmieniana, natomiast zakłócenia procesu powodują gwałtowne odchylanie się wartości regulowanego parametru od wartości dla niego pożądanej.